ARAVIND SUNDARARAJAN
3-Link Manipulator - Inverse Kinematics Visualization
An interactive demonstration of inverse kinematics algorithms with configurable robotic arm segments
Project Overview
3-Link Manipulator is an interactive visualization that demonstrates inverse kinematics algorithms in 2D space. The project allows users to experiment with different robotic arm configurations, from simple single-link systems to complex three-link manipulators, providing real-time visual feedback of how inverse kinematics solutions work.
This educational tool showcases the mathematical principles behind robotic arm control and motion planning. Users can interact with target positions and observe how the manipulator automatically calculates the joint angles needed to reach those positions, demonstrating fundamental concepts in robotics and control theory.
The visualization includes three different configurations: 1-link, 2-link, and 3-link manipulators, each demonstrating increasing complexity in inverse kinematics solutions. This provides an excellent learning environment for understanding how robotic systems solve the problem of positioning end effectors in space.
Interactive Demonstration
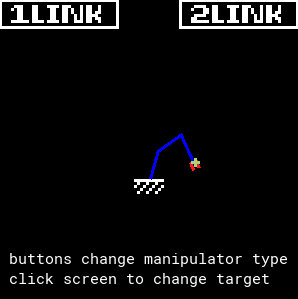
Interactive Features
- Target Positioning - Click to set target positions for the end effector
- Multi-Link Configurations - Switch between 1, 2, and 3-link manipulators
- Real-Time IK Solutions - Watch as the system calculates optimal joint angles
- Visual Feedback - See the manipulator smoothly move to reach targets
- Educational Interface - Clean, intuitive controls for learning IK concepts
Demonstration Modes
- 1-Link Manipulator - Simple single-joint system for basic IK concepts
- 2-Link Manipulator - Two-joint system showing planar IK solutions
- 3-Link Manipulator - Complex three-joint system with multiple solution possibilities
- Interactive Targets - Click anywhere to see the manipulator respond
- Real-Time Animation - Smooth motion between target positions
Key Features
IK Algorithms
- Inverse kinematics calculations
- Multiple joint configurations
- Real-time solution computation
- Joint angle optimization
- End effector positioning
Technical Features
- GameMaker Studio implementation
- HTML5 web deployment
- Interactive mouse controls
- Real-time visualization
- Educational interface design
Development Process
Educational Visualization Goals
The 3-Link Manipulator was developed as an educational tool to demonstrate inverse kinematics concepts in an interactive, visual format. The project aims to make complex robotics mathematics accessible through hands-on experimentation and real-time feedback.
The development process involved:
- IK Algorithm Implementation: Developing mathematical solutions for different link configurations
- Interactive Interface Design: Creating intuitive controls for target positioning
- Real-Time Visualization: Implementing smooth animations and visual feedback
- Multi-Configuration Support: Building systems for 1, 2, and 3-link manipulators
- Educational Content: Designing the interface for learning and experimentation
Technical Implementation
Engine: GameMaker Studio 2
Platform: HTML5 (Web)
Genre: Educational Visualization
Resolution: 300x300
Focus: Inverse Kinematics, Robotics, Interactive LearningCore Systems
- Inverse Kinematics Engine: Implemented mathematical algorithms for calculating joint angles from target positions
- Multi-Link Support: Created systems to handle different numbers of manipulator links
- Interactive Target System: Built mouse-based target positioning with real-time IK solving
- Visual Rendering: Developed clean, educational visual representation of the manipulator
- Configuration Switching: Implemented seamless transitions between different link configurations
Educational Design
- Intuitive Interface: Designed controls that make IK concepts accessible to learners
- Visual Clarity: Created clear visual representation of joint relationships and movements
- Progressive Complexity: Built from simple 1-link to complex 3-link systems
- Real-Time Feedback: Provided immediate visual response to user interactions
- Cross-Platform Accessibility: Ensured the demo works across different devices and browsers
Development Challenges
During development, several technical challenges were encountered and overcome:
Inverse Kinematics Algorithm Implementation
Implementing accurate inverse kinematics solutions for different link configurations required careful mathematical implementation. The 3-link system in particular required handling multiple solution possibilities and joint angle constraints.
Real-Time Performance
Ensuring smooth, responsive interaction while performing complex mathematical calculations required optimization of the IK algorithms and rendering systems to maintain consistent frame rates.
Educational Interface Design
Creating an interface that was both intuitive for beginners and informative for learning required careful balance between simplicity and functionality, ensuring the mathematical concepts were clearly demonstrated.
Educational Significance
The 3-Link Manipulator serves as an important educational tool, demonstrating several key concepts in robotics and control theory:
- Inverse Kinematics Fundamentals: Visual demonstration of how robotic systems calculate joint angles
- Multi-Joint Systems: Understanding how complexity increases with additional degrees of freedom
- Real-Time Control: Interactive demonstration of dynamic positioning and motion planning
- Mathematical Visualization: Making abstract robotics mathematics tangible and understandable
- Hands-On Learning: Providing experiential learning through direct interaction
This project successfully bridges the gap between theoretical robotics concepts and practical understanding, making complex mathematical principles accessible through interactive visualization.
Project Impact
The 3-Link Manipulator represents a valuable contribution to educational technology and demonstrates several important development skills:
- Educational Software Development: Creating tools that make complex concepts accessible
- Mathematical Algorithm Implementation: Translating theoretical IK equations into working code
- Interactive Visualization: Building engaging visual representations of abstract concepts
- User Experience Design: Creating intuitive interfaces for educational content
- Cross-Disciplinary Development: Combining robotics, mathematics, and software development
This project demonstrates the ability to create educational tools that effectively communicate complex technical concepts. The combination of mathematical rigor with intuitive interaction design shows how software can be used to enhance learning and understanding of advanced topics in robotics and control theory.